Matematik, fizik ve mühendislikte, Öklid vektörü veya kısaca vektör (bazen geometrik vektör,[1]konumsal vektör[2] ya da yöney) sayısal büyüklüğü (veya uzunluğu) ve yönü olan geometrik bir objedir. Vektör, genellikle bir doğru parçası ile özdeşleştirilir. Bir başlangıç noktasıA ile bir uç noktasıB'yi birleştiren bir ok şeklinde görselleştirilir[3] ve ile belirtilir.
Hız, kuvvet, ivme ve ağırlık örnek birer vektörel niceliktir. Vektörler bir sayı (skaler) ile veya başka bir vektör ile çarpılabilir ve bölünebilir. Aynı zamanda yönü değiştirilmemek şartı ile ötelenebilirler. Vektörlerin yönlü doğru parçalarından farkı budur. Yönlü doğru parçalarının koordinat sistemindeki yeri sabitken, vektörler ötelenebilirler.
Köken
İngilizcede bu yapı için kullanılan sözcük vector dür. Kökeni, "taşımak"/"bir yöne aktarmak"/"göndermek" anlamına gelen "vehere" Latince fiil gövdesidir.[4] Sözcüğün anlamı "taşıyıcı"/"yöncü" olarak düşünülebilir. Bu yüzden olabilir ki Türkçede (büyük ihtimalle Fransızcadan devşirilmiş olan) vektör karşılığından sonra yöney karşılığı kullanılmaktadır.[5]
Gösterimi
A noktasından B noktasına varan bir vektör oku
Fiziksel vektörler veya geometrik vektörler,iki boyutlu düzlem için tanımı şu şekilde yapılabilir. İki boyutlu düzlemde 2 tane nokta alınsın bu noktalar A ve B noktaları olsun. A noktasından(başlangıç noktası) B noktasına (bitiş noktası) çizilen ve normu olan bu yönlü doğru parçasına A'dan B'ye çizilen AB vektörü denir.
Gösterimi iki şekildedir : 1.gösterim
2.gösterim AB
ile gösterilir.
Ok vektörün yönünü gösterir. Doğru parçasının uzunluğu ise, vektör büyüklüğü ile doğru orantılıdır.
İki boyutlu bir koordinat düzleminde; bazen bir vektör koordinat düzlemine dik olarak gösterilmesi gerekebilir. Bir dairenin merkezinde bir nokta bulunursa (⊙), bu sembol yönü gözlemciye doğru olan bir vektörü göstermektedir. Bir dairenin içinde bir çarpı işareti bulunursa (⊗), bu sembol yönü düzlemin arkasına doğru olan bir vektörü göstermektedir. Bu semboller, bir savaş okunun ucunun görüntülenmesi ve bir savaş okunun arka kanatlarının görüntülenmesi gibi düşünülebilir.
Bir vektörün büyüklüğü
Bir vektörün büyüklüğü başlangıç ve bitiş noktaları arasında kalan doğru parçasının uzunluğudur vektörler referans noktasına göre - ve+ olmak üzere iki yöne ayrılabilirler .- yönündeki vektöre negatif yönlü vektör,+yönündeki vektere pozitif yönlü vektör denir. Vektörlerin büyüklükleri skaler nicelik ifade eder o denli bu - ve + işaretlerinin skaler bir gösterimden uzaklaşması için vektörün mutlak değerini almamız gerekir.⟨e.a⟩
AB vektörünün normu |AB| dir .
Daha genel gösterim || dir.
Soyut tanımı
Soyut olarak vektörler, bir F cisminin üzerine tanımlı bir vektör uzayının ögeleridir. Vektörler bu cisim üzerine tanımlanmış bir denklik bağıntısı yardımıyla tanımlanabilir. (n tane) olsun. a ögesi ile b ögesi,ancak bileşenlerin toplamı olarak a+d=b+c ise bağıntılıdır. Daha biçimsel olmak gerekirse
Bu bağıntının bir denklik bağıntısı olduğu kolaylıkla görülebilir. O halde vektör, denklik sınıflarıdır. Böylece denklik sınıfı temsilcisini koyu harfle gösterirsek, bir vektör
olarak tanımlanmış olur. Daha açık bir biçimde bir vektör,
şeklinde düşünülebilir.
Gösterimi
Bir vektör çok çeşitli şekillerde gösterimlenebilir. En yaygın gösterimler, üzerinde bir ok işareti () ya da koyu harf () gösterimidir. Oklu gösterimin avantajı el yazılarında kolaylıkla kullanılabilir olmasıdır. Ancak baskı ve sayısal metinlerde koyu harf kullanmak adettir.
Vektörün bileşenleriyle gösteriminde ise genellikle sıralı n-li kullanılır.
Yer yer (konunun veriliş tarzına bağlı olarak) satır ya da sütun dizey gösterimi de yeğlenir.
ya da
Yine yaygın gösterimlerden biri birim vektör gösterimidir.
ki burada
alınabilir.
Bir vektör
şeklinde düşünüldüğünde Einstein toplam uzlaşımı kullanılarak
şeklinde gösterilebilir. Bu gösterim, toplam simgesinden kurtulmada ve bileşenleri temsil edecek şekilde bir kolaylık sağlamaktadır. Genellikle tensör gösterimi olarak anılır.
Eşitlik
Ancak vektörlerden birinin her bileşeni karşılıklı olarak diğerininkine eşitse bu iki vektör eşittir.
Vektör toplamı
İki vektörün toplamı üçüncü bir vektöre eşittir. 1.şekil parelelkenar metodu,2.si ise uç uca ekleme metodudur.
Skaler (sayıl) ile çarpma
Bir vektör uzayında, skaler ve vektörler arasında bir çarpma ve dağılma olması gerekir. r,s sayılları F cismine ait olsun. O halde , vektörleri için,
Genel olarak vektörle skalerle çarpması, vektörün her bileşeninin skaler ile çarpılmasıdır.
Doğrudan çarpım (tensör çarpımı)
İki vektörün doğrudan çarpımının sonucu ne bir vektördür ne bir skalerdir, bir ikiçtir (dyad).
Bu çarpıma, eğer vektörler eş boyutluysa, çiftli (dyadic) çarpım denir. Eğer vektöreri birim vektörlerle ifade edersek
şeklinde tanımlanan iki vektör için doğrudan çarpım
=
=
+
+
olarak elde edilir. Buradaki gibi birimler yeni birer birimdir, yâni başka bir cinsinden ifade edilemez. Bu yüzden olarak tanımlandığında
=
+
+
elde edilir ki bu da dizey gösterimine tekâbül eder.
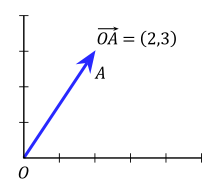
Konum (yer) vektörü
Kartezyen koordinat düzleminde bir konum(yer) vektörü. Vektörün koordinatları: A vektörü = (2,3)
Başlangıç noktası orijin olan vektörlere konum(yer) vektörü denir. Eğer vektör orjinde değilse vektörün uzunluğu ve yönünü değiştirmemek kaydıyla orjine taşıyabiliriz.
Başlangıç noktası O = (0,0), bitiş noktası A = (2,3) olan iki boyutlu bir vektör düşünelim. Bu vektör basit olarak aşağıdaki şekilde gösterilebilir:
Birim vektör, uzunluğu 1 birim olan vektörlere denir. Üç boyutlu kartezyen koordinat sistemindex,y ve z eksenleri üzerinde yer alan üç tane temel birim vektör vardır. Bunlar:
ise:
Bir vektörün normu
A vektörünün uzunluğu (normu ya da boyu), ||A|| sembolü ile gösterilir.
"i", "j" ve "k" temel birim vektörleri cinsinden yazılan bir vektörün uzunluk formülü, Pisagor teoreminin bir sonucudur. O halde:
Yukarıdaki vektörü ele alırsak:
İki vektörün birbiriyle çarpımı
Bu iki vektörü ele alırsak:
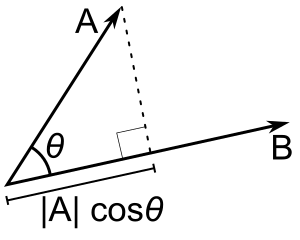
İç (Skaler) çarpım ()
Nokta çarpım da denilen çarpım yöntemiyle yapılan çarpımdır.
^"Online Etymology Dictionary". 18 Ağustos 2006 tarihinde kaynağından arşivlendi. Erişim tarihi: 25 Ocak 2007.
^Türk Dil Kurumu, Bilim ve Sanat Terimleri Ana Sözlüğü[ölü/kırık bağlantı]
Ek kaynaklar
Ivanov, A.B. (2001), "Vector", Hazewinkel, Michiel (Ed.), Encyclopaedia of Mathematics, Kluwer Academic Publishers, ISBN 978-1556080104.
Heinbockel, J. H. (2001), Introduction to Tensor Calculus and Continuum Mechanics, Trafford Publishing, ISBN 1-55369-133-4, 6 Ocak 2020 tarihinde kaynağından arşivlendi, erişim tarihi: 30 Eylül 2022






































































 Kategori
Kategori











