Gràfic mostra la variació de la velocitat v al llarg del temps t d'un mòbil que no canvia de direcció. A cada punt del gràfic v(t), el mòdul de l'acceleració ve donat pel pendent de la tangent a la corba que passa per cada punt: a(1), a(2), a(3).
En física, l'acceleració és una magnitud física que indica com canvia la velocitat d'un cos en relació amb el temps. És a dir, indica la rapidesa de l'augment o la disminució de la velocitat del moviment. O del seu canvi de direcció.
En cinemàtica l'acceleració instantània es defineix com la primera derivada de la velocitat respecte del temps (la raó del canvi de velocitat) o de manera equivalent com la segona derivada de la posició. Es tracta d'una magnitud vectorial i es mesura en unitats de longitud · temps-2 (L·T-2 o L/T²). En unitats del SI, s'expressa en metre/segon².
En llenguatge comú es parla d'acceleració per referir-se a un increment de la velocitat i de desacceleració per indicar-ne un decrement. Però en física qualsevol increment o decrement de la velocitat és anomenat acceleració; i també rep el nom d'acceleració el canvi en la direcció de la velocitat (acceleració centrípeta).
En mecànica clàssica, l'acceleració d'un punt material és proporcional a la resultant de la força que actua sobre ell. Segons la segona llei de Newton, en considerar la massa del cos independent de la velocitat:
on és la resultant o força total que actua sobre el punt; m és la seva massa i és la seva acceleració.
La magnitud de l'acceleració d'un objecte, tal com la descriu la Segona llei de Newton, és l'efecte combinat de dues causes:
el sou net de totes les forces externes que actuen sobre aquest objecte, la magnitud és directament proporcional a aquesta força neta resultant;
la massa d'aquest objecte, depenent dels materials que siguin fabricats, la magnitud és inversament proporcional a la massa de l'objecte.
Acceleració mitjana i acceleració instantània
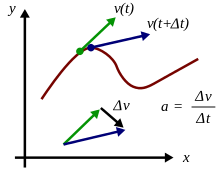
L'acceleració mitjana, es calcula fent la resta vectorial de les velocitats en dos punts diferents de la trajectòria i dividint el vector resultat entre el temps transcorregut. L'acceleració instantània és el límit del vector que en resulta quan el temps transcorregut tendeix a zero Δt → 0.
L'acceleració mitjana es defineix com el quocient entre la diferència del vector velocitat i el període transcorregut. Per a calcular l'acceleració mitjana d'un cos s'utilitza la següent fórmula:
L'acceleració instantània es calcula fent tendir a zero el període en què es determina l'acceleració mitjana, o sigui, es calcula com la derivada del vector velocitat respecte del temps:
Com que la velocitat és la derivada de la posició respecte del temps, l'acceleració també es pot expressar com la segona derivada de la posició respecte del temps ambdues vegades.
Components intrínseques de l'acceleració
Triedre de Frenet desplaçant-se amb un punt que segueix una trajectòria helicoidal
En els moviments no rectilinis l'acceleració es pot descompondre en dues components perpendiculars: una de perpendicular a la direcció del moviment, l'acceleració normal, i l'altra tangent al moviment, l'acceleració tangencial.
L'acceleració tangencial () mesura el canvi del mòdul de la velocitat del mòbil en el temps. La seva direcció és tangencial a la trajectòria i, per tant, paral·lela a la velocitat. El seu valor pot ser zero, cas en què el mòdul de la velocitat es mantingui constant. Matemàticament s'obté com la derivada del mòdul de la velocitat respecte del temps, multiplicada pel vector unitari () tangent a la trajectòria i, per tant, paral·lel a la velocitat.
L'acceleració normal () és present en qualsevol moviment no rectilini. És la que mesura la variació de la direcció del vector velocitat, és a dir, la magnitud en què s'aparta la trajectòria d'una recta. Matemàticament s'obté el seu mòdul amb la següent expressió, que depèn del mòdul de la velocitat i del radi de curvatura de la trajectòria, i es multiplica pel vector unitari normal a la trajectòria ().
L'acceleració total que soporta la partícula en moviment serà, per tant:
I com que :
Als dos vectors unitaris (tangent i normal a la trajectòria se li pot afegir un tercer obtingut pel producte vectorial dels dos. Aquests tres vectors defineixen un sistema de coordenades anomenat triedre de Frenet.
Justificació
Circumferència obtinguda a partir del punt en es troba l'objecte i altes dos molt propers. Es representen els vectors unitaris tangents a la trajectòria en aquests dos punts propers i el vector diferència aplicat al punt.
S'escriu la velocitat com el producte del seu mòdul v (o celeritat o rapidesa) pel vector unitari tangent a la trajectòria:
Derivant s'obté:
Anomenant s al mòdul del vector posició, es pot escriure:
Per tant:
Només cal explicar perquè es fa
Fixeu-vos en la figura de la dreta. A partir d'un punt de la trajectòria P0 i dos punts molt propers P-1 i P1 es pot traçar una circumferència (tres punts sempre defineixen una circumferència. La variació mitjana del vector tangent entre els punts P-1 i P1 és:
Observant el diagrama vectorial de resta dels vectors tangents es veu que això es pot expressar com:
On és el vector unitari en la direcció de la diferència, per tant es té:
Però fixeu-vos que quan els punts P-1 i P1 tendeixen a P0el sinus tendeix a ser igual a l'arc (vegeu també demostració de la identitat del quocient entre el sinus i l'angle) i els vectors tangents a la trajectòria tendeixen a ser els vectors tangents a la circumferència per tant es té:
Fixeu-vos que la fórmula es pot interpretar com la definició de r. El radi de curvatura d'una trajectòria en un punt és el radi de la circumferència traçada passant per tres punts molt propers quant aquest tres punts tendeixen a trobar-se. Aquesta circumferència s'anomena circumferència osculadora.
Fixeu-vos també que el vector normal a la trajectòria necessita aquesta circumferència per quedar completament definit, a més de ser normal al vector tangent ha de pertànyer al pla d'aquesta circumferència.
Composició d'acceleracions
La composició d'acceleracions consisteix a calcular l'acceleració que té un punt mesurada en un determinat sistema de referència, per exemple un sistema galil·leà, respecte del que es diu que és l'acceleració absoluta aab, a partir de l'acceleració respecte d'un altre sistema de referència que es mou respecte del primer anomenada acceleració relativa arel sabent el moviment del sistema de referència relatiu respecte de l'absolut.
En general es té:
on aarr és el que s'anomena acceleració d'arrossegament i acor és el que s'anomena acceleració de Coriolis.
L'acceleració d'arrossegament és l'acceleració que tindria el punt respecte de la referència absoluta si estigués fix respecte de la referència relativa. Es pot calcular amb la fórmula:
on és l'acceleració absoluta de l'origen de la referència relativa, és l'acceleració angular de la referència relative respecte de la referència absoluta, és la velocitat angular de la referència relativa respecte de la referència absoluta, i és el vector posició del punt respecte de la referència relativa.
Les tres components de l'acceleració d'arrossegament tenen un significat clar: la primera és l'acceleració deguda al fet que l'origen del sistema de coordenades està accelerant, la segona és deguda al fet que el sistema té una acceleració angular i és perpendicular al vector de posició del punt, i la tercera és l'acceleració centrípeta deguda a la velocitat de rotació de la referència relativa.
En el cas de les acceleracions la fórmula posa de manifest que no es comporten de forma additiva com en el cas de les velocitats. En el cas de les velocitats la velocitat absoluta és la velocitat relativa més la velocitat d'arrossegament (la velocitat que tindria el punt respecte de la referència absoluta si estigués fix a la referència relativa). En canvi en les acceleracions apareix un terme complementari anomenat acceleració de coriolis. Aquest terme es pot calcular com:
on és la velocitat del punt respecte de la referència relativa.
Demostració
Per obtenir l'expressió que permet calcular l'acceleració absoluta a partir de l'acceleració relativa i del moviment de la referència relativa respecte de la referència absoluta, es parteix de l'expressió que permet calcular la velocitat:
On és la velocitat del punt en la referència absoluta, la velocitat del punt en la referència relativa, és la velocitat absoluta de l'origen de coordenades de la referència relativa, és la velocitat angular de la referència relativa respecte de la referència absoluta (velocitat angular d'arrossegament) i és el vector de posició del punt en la referència relativa.
Derivant respecte del temps per trobar l'acceleració s'obté:
La derivada temporal de la velocitat absoluta de l'origen de la referència relativa és la seva acceleració i la derivada temporal de la velocitat angular de la referència relativa respecte de l'absoluta és la seva acceleració angular per tant l'expressió es pot escriure com:
(1)
Per entendre el significat de la derivada de la velocitat relativa respecte del temps cal tenir present que la velocitat relativa és un vector que els seus components estan multiplicats pels vectors directors de la base mòbil, per tant, per derivar-lo respecte del temps, es té:
Els tres primers components són les derivades de les components de la velocitat respecte de la referència relativa multiplicades pels vectors directors de la referència relativa, per tant, és el vector acceleració relativa . Substituint queda:
(2)
En derivar cada un dels vectors directors de la referència relativa respecte del temps en general s'obtindrà un vector per cada un que tindrà tres components:
En notació matricial això permet expressar les tres últimes components com:
Però, pel fet que els vectors directors tinguin mòdul constant (=1) ha de ser ωxx = ωyy = ωzz = 0.
A més pel fet de ser perpendiculars entre ells i continuar sent-ho en tot moment ha de ser ωyx = -ωxy, ωzx = -ωxz i ωzy = -ωyz, per tant l'expressió es pot escriure:
Substituint a (2) queda:
(3)
On tenint en compte que ωij vol dir: el component en la direcció j de la derivada temporal del vector director i.
En l'últim terme de l'equació (1) cal calcular la derivada temporal del vector posició respecte de la referència relativa, com que aquest vector es pot expressar com el producte de les seves components pels vectors directors de la referència relativa, seguin el mateix raonament s'arriba a:
(4)
Substituint (3) i (4) en (1), operant i reordenant termes s'obté:
on:
Acceleració dels punts del sòlid rígid
Un sòlid rígid és un conjunt de punts, units o no, tals que entre ells hi ha sempre a la mateixa distància. Per conèixer el moviment de tots els punts d'un sòlid rígid, n'hi ha prou amb conèixer el moviment d'un punt O del sòlid i el moviment d'un sistema de referència solidari al sòlid que tingui aquest punt com a origen.
A partir d'aquí es pot determinar l'acceleració d'un punt qualsevol del sòlid a partir del seu vector de posició en aquesta referència solidària al sòlid amb:
on i són respectivament la velocitat angular i l'acceleració del sòlid (és a dir, de la referència solidària al sòlid amb origen al punt O en la que es mesura el vector OP).
Transformació d'una acceleració en teoria de la relativitat
Tot el que s'ha explicat fins aquí és vàlid suposant que el temps i la longitud dels objectes no canviïn en canviar de sistema de referència. En el cas de sistemes de referència que tinguin una velocitat relativa apreciable respecte de la velocitat de la llum aquesta aproximació no és vàlida i cal aplicar la teoria de la relativitat en el cas de dos sistemes amb velocitat relativa v constant entre ells l'acceleració es pot descompondre en una component paral·lela a la velocitat relativa entre els observadors ax i un altre de perpendicular a aquesta ay. Coneguda l'acceleració que mesura un observador O₂ es pot determinar la que mesura un observador O1 amb les següents fórmules:[1]
↑Paul Lorrain, Dale R. Corson, Electromagnetic fields and waves. ISBN 0716703319. Al capítol 5 apartat 5.12 es presenten aquestes fórmules.
Bibliografia
Joaquim Agulló i Batlle et al, Fascicles de mecànica. Fascicle 2: Composició de moviments, CPDA, ETSEIB.
Joaquim Agulló i Batlle et al, Fascicles de mecànica. Fascicle 3: Components intríseques de la velocitat i l'acceleració, CPDA, ETSEIB.
Joaquim Agulló i Batlle et al, Fascicles de mecànica. Fascicle 4: Cinemàtica del sòlid rígid, CPDA, ETSEIB.
Joaquim Agulló i Batlle, Mecànica de la partícula i del sòlid rígid, Publicacions OK Punt, 1995, ISBN 84-920850-0-2
Serway, Raymond A.; Jewett, John W.. Physics for Scientists and Engineers. 6a edició. Brooks/Cole, 2004. ISBN 0-534-40842-7.
Tipler, Paul. Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics. 5a edició. W. H. Freeman, 2004. ISBN 0-7167-0809-4.

 , 20 gener 1700
, 20 gener 1700 














































![{\displaystyle {\begin{aligned}&\left(v_{x}{\frac {d}{dt}}{\overset {\to }{\mathop {e_{x}} }}\,\right)+\left(v_{y}{\frac {d}{dt}}{\overset {\to }{\mathop {e_{y}} }}\,\right)+\left(v_{z}{\frac {d}{dt}}{\overset {\to }{\mathop {e_{z}} }}\,\right)=\left({\begin{matrix}v_{x}&v_{y}&v_{z}\\\end{matrix}}\right)\cdot \left({\begin{matrix}0&\omega _{xy}&\omega _{xz}\\-\omega _{xy}&0&\omega _{yz}\\-\omega _{xz}&-\omega _{yz}&0\\\end{matrix}}\right)\centerdot \left({\begin{matrix}{\overset {\to }{\mathop {e_{x}} }}\,\\{\overset {\to }{\mathop {e_{y}} }}\,\\{\overset {\to }{\mathop {e_{z}} }}\,\\\end{matrix}}\right)\\&=\left({\begin{matrix}v_{x}&v_{y}&v_{z}\\\end{matrix}}\right)\cdot \left({\begin{matrix}\omega _{xy}\cdot {\overset {\to }{\mathop {e_{y}} }}\,+\omega _{xz}\cdot {\overset {\to }{\mathop {e_{z}} }}\,\\-\omega _{xy}\cdot {\overset {\to }{\mathop {e_{x}} }}\,+\omega _{yz}\cdot {\overset {\to }{\mathop {e_{z}} }}\,\\-\omega _{xz}\cdot {\overset {\to }{\mathop {e_{x}} }}\,-\omega _{yz}\cdot {\overset {\to }{\mathop {e_{y}} }}\,\\\end{matrix}}\right)\\&=v_{x}\cdot \omega _{xy}\cdot {\overset {\to }{\mathop {e_{y}} }}\,+v_{x}\cdot \omega _{xz}\cdot {\overset {\to }{\mathop {e_{z}} }}\,-v_{y}\cdot \omega _{xy}\cdot {\overset {\to }{\mathop {e_{x}} }}\,+v_{y}\cdot \omega _{yz}\cdot {\overset {\to }{\mathop {e_{z}} }}\,-v_{z}\cdot \omega _{xz}\cdot {\overset {\to }{\mathop {e_{x}} }}\,-v_{z}\cdot \omega _{yz}\cdot {\overset {\to }{\mathop {e_{y}} }}\,\\&={\overset {\to }{\mathop {e_{x}} }}\,\cdot \left(-v_{y}\cdot \omega _{xy}-v_{z}\cdot \omega _{xz}\right)+{\overset {\to }{\mathop {e_{y}} }}\,\cdot \left(v_{x}\cdot \omega _{xy}-v_{z}\cdot \omega _{yz}\right)+{\overset {\to }{\mathop {e_{z}} }}\,\cdot \left(v_{x}\cdot \omega _{xz}+v_{y}\cdot \omega _{yz}\right)\\&={\overset {\to }{\mathop {e_{x}} }}\,\cdot \left(\left[-\omega _{xz}\right]\cdot v_{z}-\omega _{xy}\cdot v_{y}\right)-{\overset {\to }{\mathop {e_{y}} }}\,\cdot \left(\omega _{yz}\cdot v_{z}-\omega _{xy}\cdot v_{x}\right)+{\overset {\to }{\mathop {e_{z}} }}\,\cdot \left(\omega _{yz}\cdot v_{y}-\left[-\omega _{xz}\right]\cdot v_{x}\right)\\&=\left|{\begin{matrix}{\overset {\to }{\mathop {e_{x}} }}\,&{\overset {\to }{\mathop {e_{y}} }}\,&{\overset {\to }{\mathop {e_{z}} }}\,\\\omega _{yz}&-\omega _{xz}&\omega _{xy}\\v_{x}&v_{y}&v_{z}\\\end{matrix}}\right|\\&=\left({\begin{matrix}\omega _{yz}&-\omega _{xz}&\omega _{xy}\\\end{matrix}}\right)\centerdot \left({\begin{matrix}{\overset {\to }{\mathop {e_{x}} }}\,\\{\overset {\to }{\mathop {e_{y}} }}\,\\{\overset {\to }{\mathop {e_{z}} }}\,\\\end{matrix}}\right)\wedge \left({\begin{matrix}v_{x}&v_{y}&v_{z}\\\end{matrix}}\right)\centerdot \left({\begin{matrix}{\overset {\to }{\mathop {e_{x}} }}\,\\{\overset {\to }{\mathop {e_{y}} }}\,\\{\overset {\to }{\mathop {e_{z}} }}\,\\\end{matrix}}\right)\\&={\overset {\to }{\mathop {\omega _{arr}} }}\,\wedge {\overset {\to }{\mathop {v_{rel}} }}\,\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f81888ca76b3935f88566c9ec1d161658206dfef)








![{\displaystyle {\begin{aligned}&a_{1x}={\frac {a_{2x}}{\gamma ^{3}\left[1+\left({\frac {v_{2x}\cdot v}{c^{2}}}\right)\right]^{3}}}\\&a_{1y}={\frac {a_{2y}-{\frac {v_{2y}\cdot v}{c^{2}+v_{2x}\cdot v}}a_{2x}}{\gamma ^{3}\left[1+\left({\frac {v_{2x}\cdot v}{c^{2}}}\right)\right]^{3}}}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8eed859fa08666452d9af8a81f4017df652bc5d1)

